
Bonjour,
comment vous avez trouver l'ordre des fils A+ A- B+B-
j ai acheter les moteur sur https://www.rc-letmathe.de/ j ai aucune information sur les moteurs
Merci
Re: aide recherche informations
12Bonjour,
Apparemment tes moteurs sont des 4 fils. alors tu suis le tuto suivant pour retrouver les 2 bobines A et B.
https://www.lesimprimantes3d.fr/forum/t ... as-part-1/
Bonne recherche
Apparemment tes moteurs sont des 4 fils. alors tu suis le tuto suivant pour retrouver les 2 bobines A et B.
https://www.lesimprimantes3d.fr/forum/t ... as-part-1/
Bonne recherche
Re: aide recherche informations
13Bonjour,
le moteur marche mais par à-coups j ai changer le nombre de pas en mm "nb mm/pas" j ai mis 1.09 puis 16.2, dans Jedicut et dans la carte arduino " televerse". rien ne change
j ai une vis m12 (le pense que c est le pas 1.75) le moteur 200 pas quelle valeur mettre ?
Merci
le moteur marche mais par à-coups j ai changer le nombre de pas en mm "nb mm/pas" j ai mis 1.09 puis 16.2, dans Jedicut et dans la carte arduino " televerse". rien ne change
j ai une vis m12 (le pense que c est le pas 1.75) le moteur 200 pas quelle valeur mettre ?
Merci
Re: aide recherche informations
14Dans le dossier complet tu as un sous-dossier "initiation aux calculs des transmissions", tout est expliqué dans le pdf et tu as même un tableur pour entrer tes valeurs.
A+
Alain
A+
Alain
Re: aide recherche informations
15Salut,
Petite astuce complémentaire : mettre un réglage de coefficient de 1 dans Jedicut, comme ça Jedicut va croire que 1 ordre de rotation = 1 mm. On déplace le chariot sur une grande distance et ensuite on applique la règle de 3
Petite astuce complémentaire : mettre un réglage de coefficient de 1 dans Jedicut, comme ça Jedicut va croire que 1 ordre de rotation = 1 mm. On déplace le chariot sur une grande distance et ensuite on applique la règle de 3
Jerome
Re: aide recherche informations
16Bonjour,
je suis arrivé a faire marche les moteurs, quand je me déplace de 20 mm le moteur tourne normalement , puis je mets 100 mm"de déplacement" le moteur tourne normalement puis le moteur commence a tourne plus rapidement . Est-ce que cela est normal ?
j aimerai savoir quelle type de cable USB utilisez vous? USB2 ou USB3
quand j utilise le cable de arduino ( livré avec) ca marche
avec les autres cables ca me marche pas pourquoi ? "Les coefficients de vitesse"
Merci
je suis arrivé a faire marche les moteurs, quand je me déplace de 20 mm le moteur tourne normalement , puis je mets 100 mm"de déplacement" le moteur tourne normalement puis le moteur commence a tourne plus rapidement . Est-ce que cela est normal ?
j aimerai savoir quelle type de cable USB utilisez vous? USB2 ou USB3
quand j utilise le cable de arduino ( livré avec) ca marche
avec les autres cables ca me marche pas pourquoi ? "Les coefficients de vitesse"
Merci
Re: aide recherche informations
17Bonjour Smiley,
Tu as bien travaillé si tes moteurs tournent, Pour que je puisse t'aider, il me faut quelques renseignements.
Tout d'abord, tu utilise quel sketch arduino : simple sans affichage, simple avec affichage, version luxe avec les potentiomètres et les inters de commande, version super luxe avec fin de course.
Tu dois avoir les mêmes moteurs et les mêmes vis sur les 4 axes
Pour tes vis de 12, est-ce que tu as vérifié le pas ? Pour mesurer le pas, tu mesures la distance de déplacement du chariot lorsque tu tournes manuellement la vis de 10 tours. Pas en mm = distance /10. Pour un pas de vis de 1.25 tu dois avoir 12.5 mm de déplacement pour 10 tours, pour un pas de 1.5mm tu dois avoir 15mm de déplacement.
Maintenant, regardons les moteurs, normalement ce sont des 200steps par tour. Je recommande de mettre l'électronique Ramps 1.4 en 1/2 step ce qui va donner 400 steps par tours. Si tu as des vis de 1.5mm de pas, pour 1 step, le déplacement sera de 0.00375mm (1.5/400). pour un pas de vis de 1.25 on aura 0.00325 mm.
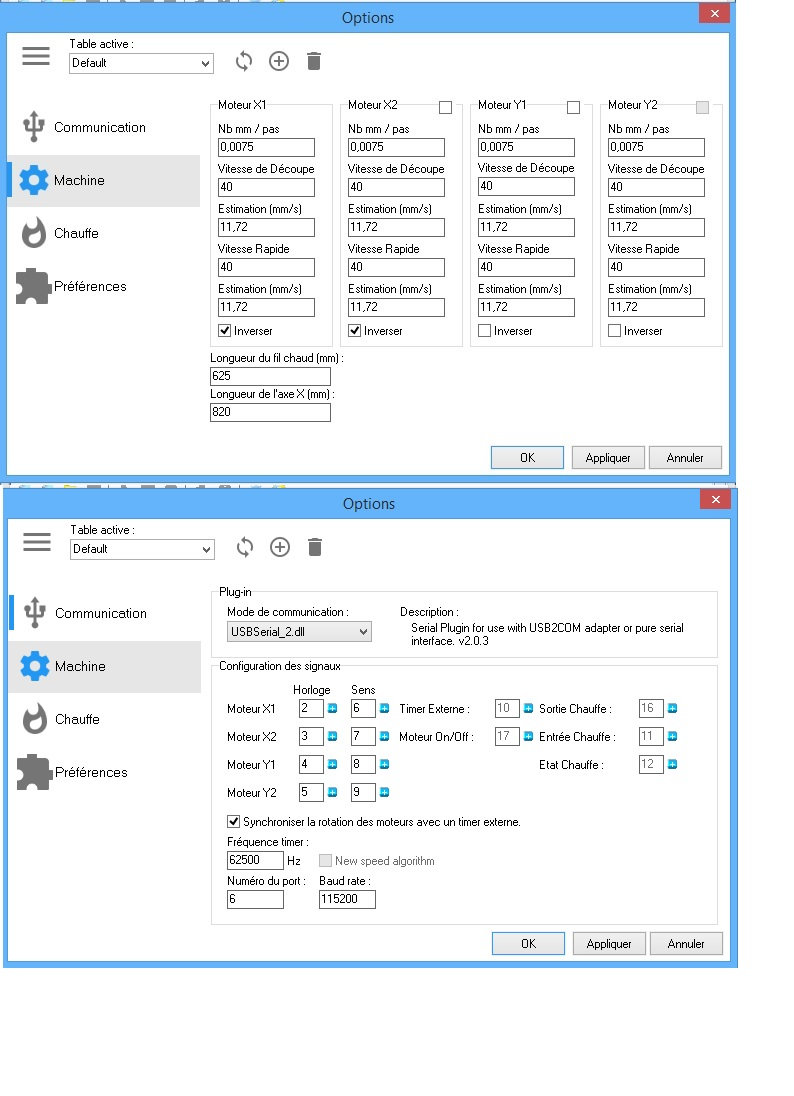
Dans le tableau ci-dessous, voici les paramètre à configurer pour avoir la vitesse de 3.1mm/s en vitesse de coupe et 5mm/s en vitesse rapide.
Attention ce tableau donnent les valeurs pour le pas de 1.5mm colonne X1, pas de 1.25 colonne X2, pas de 1mm colonne Y1 Suivant le pas retenu les 4 colonnes doivent avoir les mêmes valeurs.

Pour ce qui est de la liaison USB, usb2 convient bien. Par contre, lorsque nous avons des valeurs de coefficient de vitesse inférieures à 63, Il y a des perturbations, nous n'obtenons pas les vitesses programmées. Dans ton cas, avec les valeurs du tableau ci-dessus, tu ne peux pas atteindre la vitesse rapide. Il faut que tu mettes un hub dans la liaison USB comme précisé dans la notice.
Déjà en utilisant les valeurs du tableau, tu peux faire des essais convenablement sans utiliser la vitesse rapide en attendant de disposer un hub uSB.
Bons essais, j'attends des nouvelles.
Tu as bien travaillé si tes moteurs tournent, Pour que je puisse t'aider, il me faut quelques renseignements.
Tout d'abord, tu utilise quel sketch arduino : simple sans affichage, simple avec affichage, version luxe avec les potentiomètres et les inters de commande, version super luxe avec fin de course.
Tu dois avoir les mêmes moteurs et les mêmes vis sur les 4 axes
Pour tes vis de 12, est-ce que tu as vérifié le pas ? Pour mesurer le pas, tu mesures la distance de déplacement du chariot lorsque tu tournes manuellement la vis de 10 tours. Pas en mm = distance /10. Pour un pas de vis de 1.25 tu dois avoir 12.5 mm de déplacement pour 10 tours, pour un pas de 1.5mm tu dois avoir 15mm de déplacement.
Maintenant, regardons les moteurs, normalement ce sont des 200steps par tour. Je recommande de mettre l'électronique Ramps 1.4 en 1/2 step ce qui va donner 400 steps par tours. Si tu as des vis de 1.5mm de pas, pour 1 step, le déplacement sera de 0.00375mm (1.5/400). pour un pas de vis de 1.25 on aura 0.00325 mm.
Dans le tableau ci-dessous, voici les paramètre à configurer pour avoir la vitesse de 3.1mm/s en vitesse de coupe et 5mm/s en vitesse rapide.
Attention ce tableau donnent les valeurs pour le pas de 1.5mm colonne X1, pas de 1.25 colonne X2, pas de 1mm colonne Y1 Suivant le pas retenu les 4 colonnes doivent avoir les mêmes valeurs.
Pour ce qui est de la liaison USB, usb2 convient bien. Par contre, lorsque nous avons des valeurs de coefficient de vitesse inférieures à 63, Il y a des perturbations, nous n'obtenons pas les vitesses programmées. Dans ton cas, avec les valeurs du tableau ci-dessus, tu ne peux pas atteindre la vitesse rapide. Il faut que tu mettes un hub dans la liaison USB comme précisé dans la notice.
Déjà en utilisant les valeurs du tableau, tu peux faire des essais convenablement sans utiliser la vitesse rapide en attendant de disposer un hub uSB.
Bons essais, j'attends des nouvelles.
Re: aide recherche informations
18Bonjour,
Merci pour ton aide
tout fonctionne correctement " avance correct , problème USB résolu ajouter hub usb
samedi je testerais avec le fil chaud
Merci beaucoup
Merci pour ton aide
tout fonctionne correctement " avance correct , problème USB résolu ajouter hub usb
samedi je testerais avec le fil chaud
Merci beaucoup
Re: aide recherche informations
19Tant mieux. Donnes nous tout de même le pas de tes vis, et le modèle d'électronique que tu utilises.
Merci cela me permet de compléter les docs.
Merci cela me permet de compléter les docs.
Re: aide recherche informations
20Bonjour,
voici ma config
pas 3 avec une vis M12
Carte MEGA2560 R3
Mondule de Pilote A4988
moteur Bipolarer Schrittmotor 1,8A Strangstrom, 48Ncm
Contrôleur RAMPS 1.4
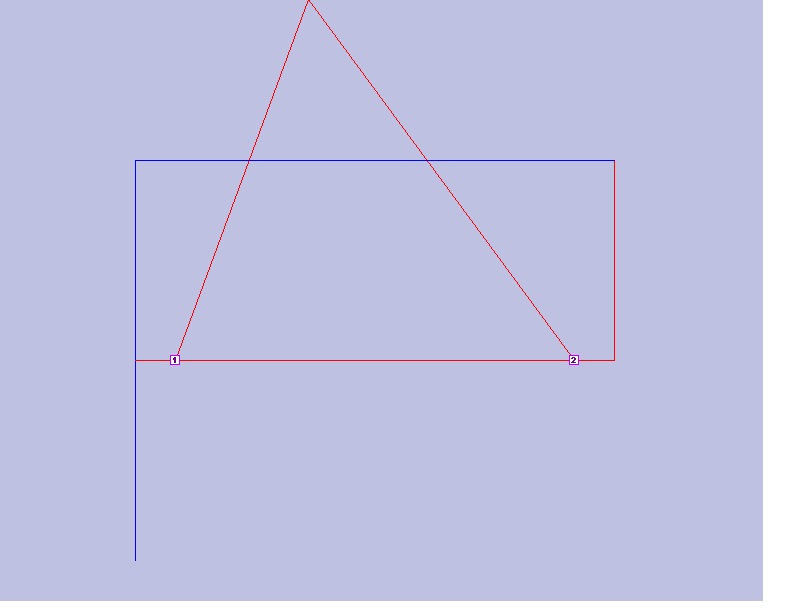 j'ai quelques problèmes j aimerai faire un triangle en 1 fois
j'ai quelques problèmes j aimerai faire un triangle en 1 fois
comment faire ?
Merci
voici ma config
pas 3 avec une vis M12
Carte MEGA2560 R3
Mondule de Pilote A4988
moteur Bipolarer Schrittmotor 1,8A Strangstrom, 48Ncm
Contrôleur RAMPS 1.4
comment faire ?
Merci
