
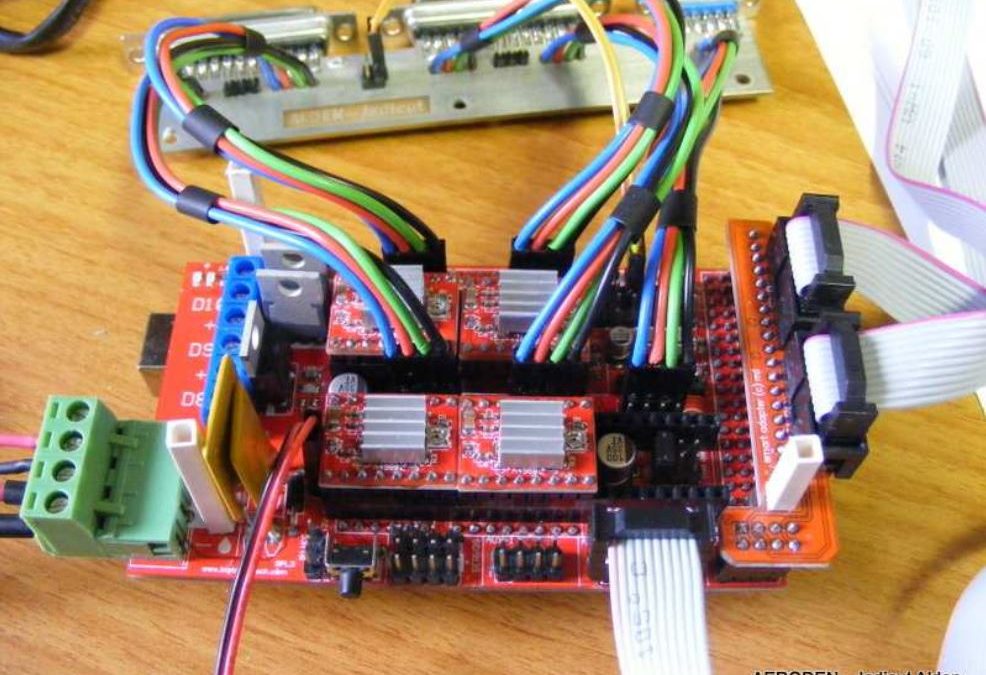
Nous avons vu dans un premier article comment construire cette carte à base de carte Arduino Mega et Ramps 1.4. En fonction du modèle que vous avez choisi de faire, votre carte doit ressembler à ça :
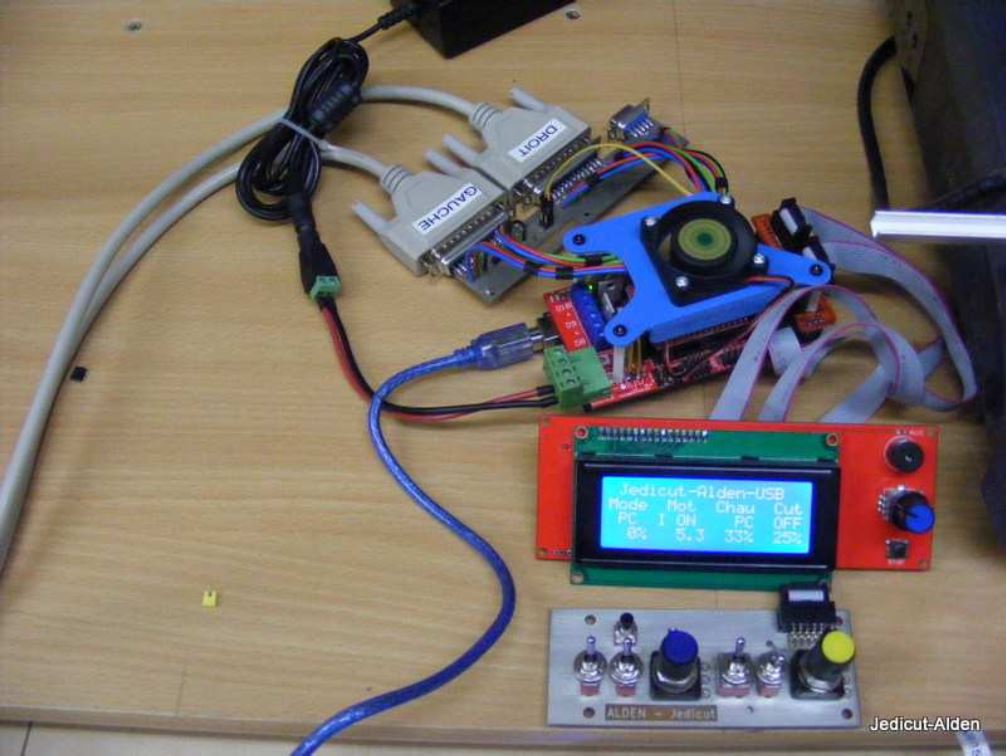
Ici c’est la version luxe qui est présentée, avec affichage et panneau de contrôle.
Pour savoir quoi acheter, toutes les références sont dans la boutique CNC de Jedicut.
Nous allons maintenant voir la configuration de Jedicut et faire les tests.
Préparation de Jedicut
Dans le dossier où vous avez installé Jedicut, 2 fichiers sont importants :
- USBSerial_2.dll : Dans le répertoire dll de Jedicut, c’est ce fichier qui permet à Jedicut de communiquer avec votre carte Arduino.
- comport.ini : Dans le répertoire Jedicut.
Modifiez le fichier comport.ini avec le Bloc-notes pour :
- Indiquez le n° du port de communication que vous avez noté lors du téléversement.
- Indiquez la vitesse de communication, normalement 115200.
Configuration de Jedicut
Configuration des options de communication
Menu Outils > Options, onglet Communication.
Remplissez comme ceci :
- Table active : la vôtre.
- Mode de communication : USBSerial_2.dll
- Configuration port parallèle : faites comme l’image ci-dessous (c’est imposé par le programme Arduino).
- Synchroniser la rotation des moteurs avec un timer externe : cochez.
- Fréquence timer : 62500 Hz.
- New speed algorithm : décochez.
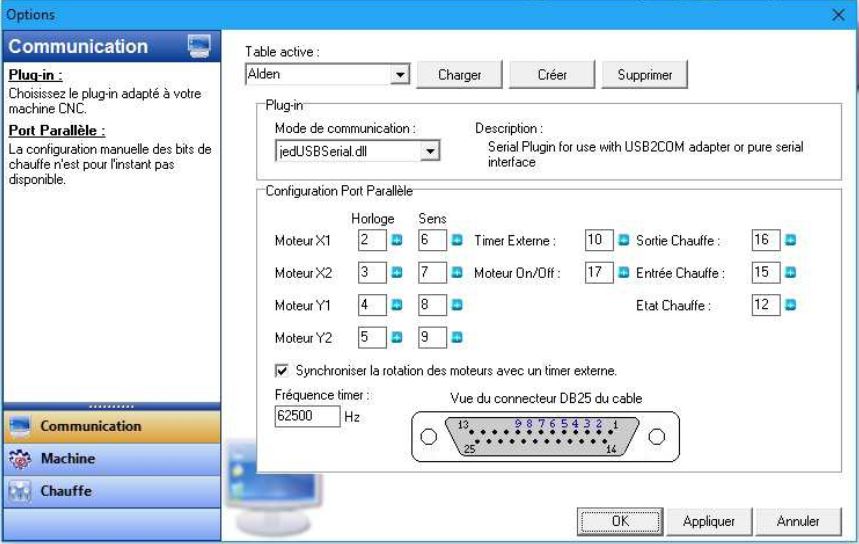
Faite Appliquer et OK.
Configuration des options de votre machine
Menu Outils > Options, onglet Machine.
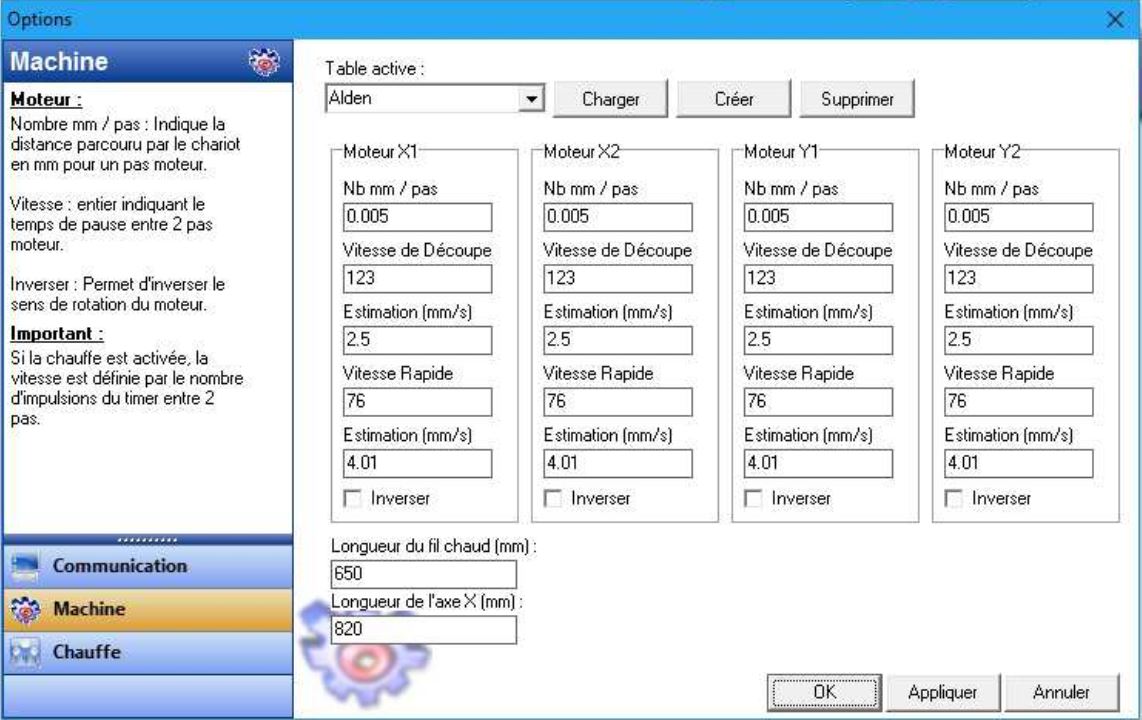
- Nb mm / pas : Caractéristiques mécaniques de votre machine. Exemple Tige filetée 6 mm x 1 mm ; moteur 100 pas par tour, électronique réglée sur ½ pas ; nous devons donc fournir 200 steps par tour ce qui donne 1 mm / 200= 0.005 mm / steps.
Important : Vous devez saisir la même valeur que celle indiquée dans le sketch.
- Vitesse de découpe ou rapide : il s’agit de coefficients indiquant un temps de pause entre 2 ordres de rotation. Jedicut calcule ensuite automatiquement la vitesse de déplacement en mm/s.
Coefficient de vitesse max = vitesse minimum : ces valeurs sont limitées dans le programme Arduino à 255 pour le max.
Coefficient de vitesse minimum= vitesse maximum : Le fonctionnement est garanti jusqu’à 63 pour le mini. Si vous avez besoin de descendre plus bas c’est possible mais il est nécessaire de disposer d’un Hub USB entre le PC et l’Arduino, le Hub améliore la vitesse de transmission (je n’ai pas trouvé pourquoi). Toutefois il faut se limiter à la valeur basse de 30.
Sans mettre de Hub USB, si vous voulez des vitesses plus rapides, vous passez en pas entier les drivers de la Ramps 1.4 et vous passez à 0.01 mm/steps.
Durant les essais vous reviendrez dans cette fenêtre pour inverser les mouvements si nécessaire.
Faite Appliquer et OK.
Configuration de la chauffe
Menu Outils > Options, onglet Chauffe.
- Activer / Désactiver la chauffe : cochez. Cette option est la seule qu’il faut activer.
La configuration des matériaux n’est pas nécessaire pour nos tests.
Faite Appliquer et OK. Fermez Jedicut.
Test des versions simple et affichage avec Jedicut
1 – Positionnez à la main la mécanique de vos axes X1, X2, Y1, Y2 à au moins 20 mm des butées mécaniques.
2 – Mise sous tension et raccordement :
- 12V à brancher en premier,
- Câble USB à brancher au PC,
- RAZ de la carte Arduino (bouton reset sur la carte)
3 – Démarrez Jedicut.
4 – Lancez une commande manuelle de 10 mm en vitesse de coupe pour chaque axe.
Important : Si vous n’avez pas choisi le bon plugin, vous modifier votre choix dans les options de Jedicut, puis fermer et relancer Jedicut.
Contrôle du sens de rotation : S’il est besoin d’inverser le sens, allez dans le menu Outils > Options et onglet Machine, cochez la case correspondante puis faites Appliquer et OK. Vérifiez que le sens de rotation soit maintenant correct.
Contrôle des distances de déplacement : Si ce n’est pas bon, vérifiez vos calculs et modifiez le Sketch Arduino (conf.h) puis téléversez de nouveau le sketch. N’oubliez pas de reporter le même coefficient dans Jedicut.
Pour la version avec affichage voici les écrans pendant la découpe.
Ici découpe en vitesse lente.
Ici découpe en vitesse rapide. Le 7.8 mm/s est juste là pour montrer la vitesse la plus rapide de fonctionnement de ma machine.
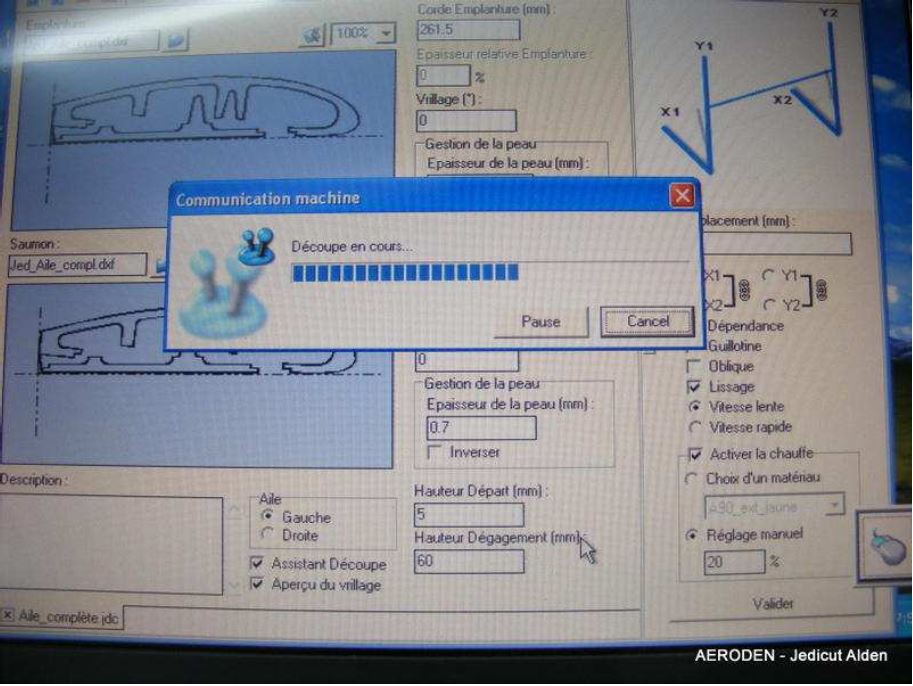
Pour conclure vos essais
Je fournis dans le dossier un fichier avec un profil de test : Aile_complète.jdc
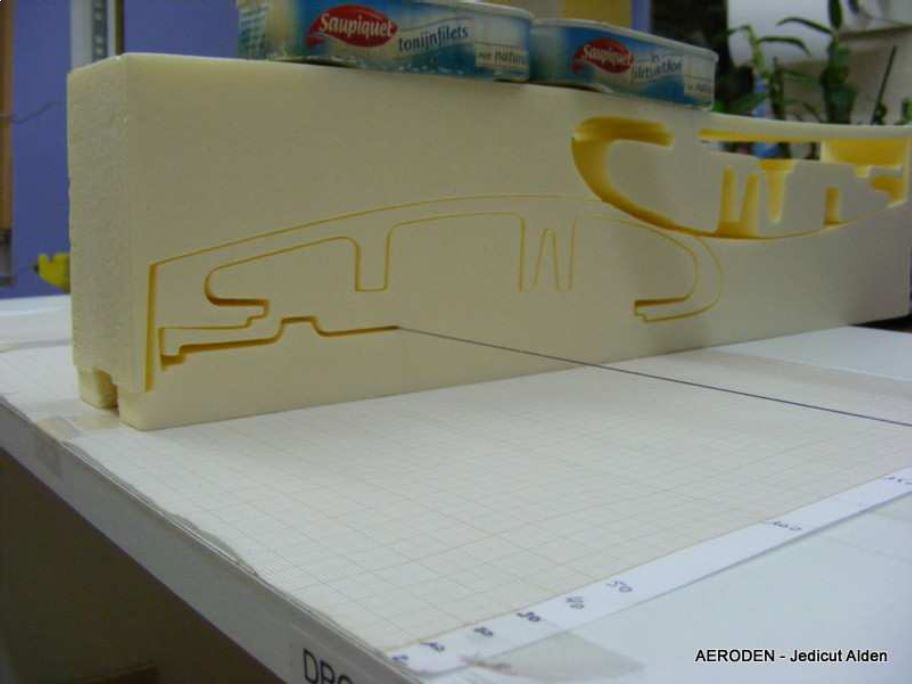
Comme ce sont des essais, il manque un petit morceau 😉
Avec mon ancienne machine et l’électronique Arduino + Ramps 1.4 Le résultat est très bon 🙂
C’est la fin de ce dossier sur la construction d’une carte de contrôle CNC à base d’Arduino Mega et de Ramps 1.4. Si vous avez des questions, rendez vous sur le forum 😉
Le dossier complet avec tous les fichiers nécessaires à la réalisation de cette carte de contrôle est disponible ici : https://drive.google.com/open?id=0BwnRsMt6_HIYZzZzNWQzS1FOQ
Auteur : AERODEN
Blog : http://alainfelixdenis.wordpress.com/
Site internet : http://www.aeroden.fr


