
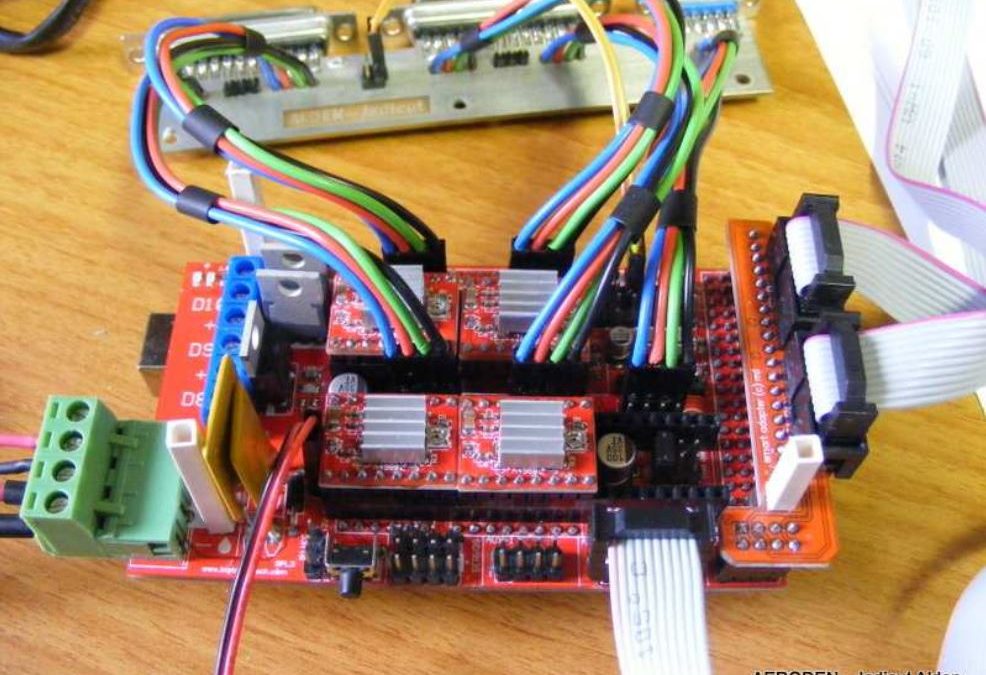
Nous avons vu dans un premier article comment construire cette carte à base de carte Arduino Mega et Ramps 1.4. Votre carte doit ressembler à ça :
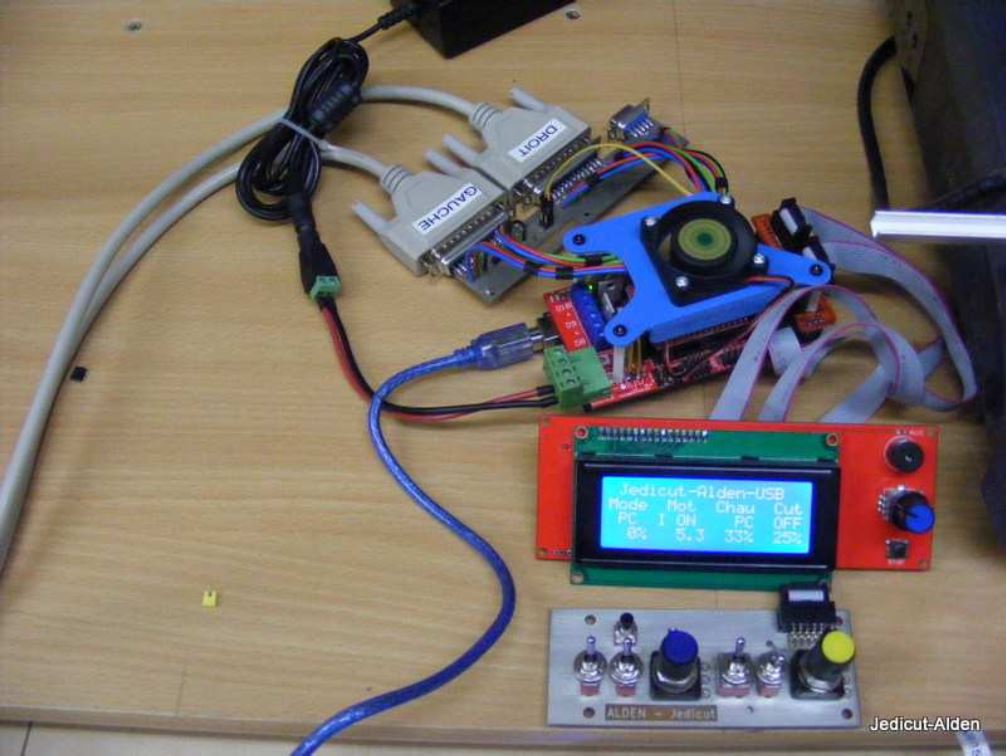
Ici c’est la version luxe qui est présentée, avec affichage et panneau de contrôle.
Si vous cherchez une boutique sérieuse pour commander votre Arduino Mega et votre Ramps 1.4, voici 2 kits parfaits pour se lancer :
- Un bon kit complet avec écran pour 42,70€ sur Amazon (lien affilié).
- Un kit sans écran à 28,75€ sur Amazon (lien affilié).
Nous allons maintenant voir la configuration de Jedicut et faire les tests.
Préparation de Jedicut
Mise en place des nouvelles DLL et fichier comport.ini. Ceux-ci font partie du dossier.
Attention: Sous W10 vous ne pouvez pas modifier les fichiers d’un dossier du répertoire Programme Files(x86). Pour y avoir accès allez sur Programme Files(x86) dans votre explorateur de fichier, cliquez droit sur le dossier Jedicut, Propriétés, Sécurité, donnez-vous tous les droits. Vous pourrez ainsi réaliser les opérations qui suivent.
Dans le dossier de Jedicut de Programme Files (x86), ajoutez les fichiers fournis dans le dossier :
- Les 2 dll : jedUSBSerial.dll et Al1_USBSerial.dll dans le répertoire dll de Jedicut.
- Le fichier « comport.ini » dans le répertoire Jedicut.
Modifiez le fichier comport.ini pour lui donner le N° du port de communication que vous avez noté lors du téléversement. La vitesse doit être de 115200.
Ouvrir le fichier comport.ini avec le Bloc-notes. Faites les modifications, sauvez le fichier.
Configuration de Jedicut
Configuration des options de communication
Ouvrez Jedicut, faites : Outils puis Option et onglet Communication.
Remplissez comme ceci :
- Table active : la vôtre.
- Mode de communication : jedUSBSerial.dll
- Configuration des ports parallèles : faites comme l’image ci-dessous (c’est imposé par le programme Arduino).
- Case à cocher Synchroniser la rotation des moteurs avec un timer externe : cochée ou pas cela ne change rien, cette option est inutile pour cette carte.
- Fréquence timer : 62500 Hz.
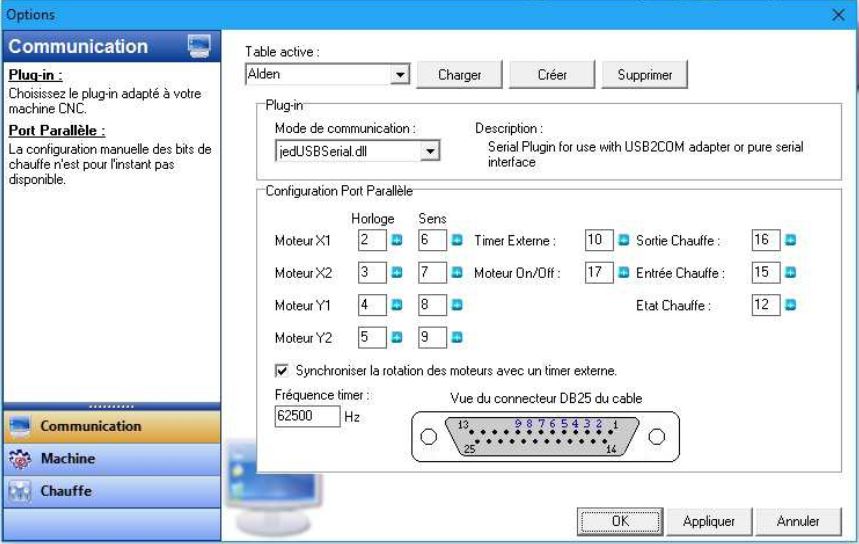
Faire Appliquer et OK.
Configuration des options de votre machine
Faites Outils puis Option et onglet Machine.
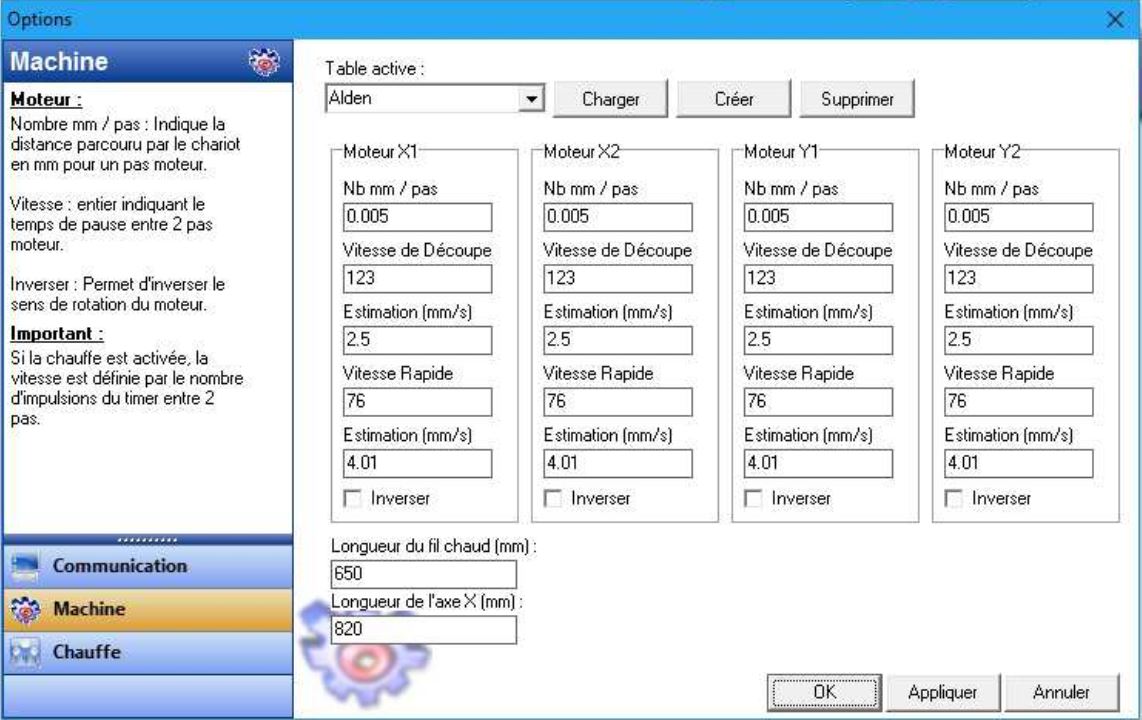
Caractéristiques mécaniques de votre machine Tige filetée 6 mm x 1 mm ; moteur 100 pas par tour, électronique réglée sur ½ pas ; nous devons donc fournir 200 steps par tour ce qui donne 1 mm / 200= 0.005 mm / steps.
Les coefficients de vitesse de découpe ou rapide se calculent aussi :
- Nous avons mis une fréquence de timer de 62500 Hz sur la vue précédente, avec la valeur de 123 qui sera transmise à l’Arduino nous allons diviser la fréquence de 62500/123 = 508 Hz ce qui va générer des steps à cette fréquence. Nous avons 0.005 mm x 508 = 2.54 mm/s Le calcul de Jedicut est bon.
- Pour la vitesse rapide, 76 donne 4 mm/s.
Attention : ces valeurs sont limitées dans le programme Arduino à 255 pour le max.
Le fonctionnement est garanti jusqu’à 63 pour le mini. Si vous avez besoin de descendre plus bas c’est possible mais il est nécessaire de disposer d’un Hub USB entre le PC et l’Arduino, le Hub améliore la vitesse de transmission (je n’ai pas trouvé pourquoi). Toutefois il faut se limiter à la valeur basse de 30.
(Hub NGS 4 ports sans alimentation).
Sans mettre de Hub USB, si vous voulez des vitesses plus rapides, vous passez en pas entier les drivers de la Ramps 1.4 et vous passez à 0.01 mm/steps.
Aux essais vous reviendrez sur cette vue pour inverser les mouvements si nécessaire.
Faire Appliquer et OK. Fermez Jedicut.
Test des versions simple et affichage avec Jedicut
Pour les essais, positionnez à la main la mécanique de vos axes X, X1, Y, Y1 à au moins 20 mm des butées mécaniques.
Lancer Jedicut et une commande manuelle de 10 mm en vitesse de coupe par axe pour vérifier le sens de rotation. S’il est besoin d’inverser le sens aller dans Outils puis Option et onglet Machine cocher la case correspondante puis faites Appliquer et OK et vérifiez votre action.
Vérifier les distances de déplacement. Si ce n’est pas bon, vérifiez vos calculs et modifiez le Sketch Arduino conf.h puis téléversez de nouveau le sketch.
Dépannage : Si vous n’avez pas de communication, vous pouvez essayer l’autre dll :
- Al1_USBSerial.dll, choisir dans Outils puis Option et onglet Communication.
- Faire Appliquer et OK
- Fermer Jedicut, le rouvrir ensuite.
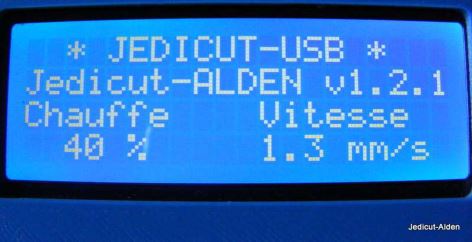
Pour la version avec affichage voici les écrans pendant la découpe.
Ici découpe en vitesse lente.
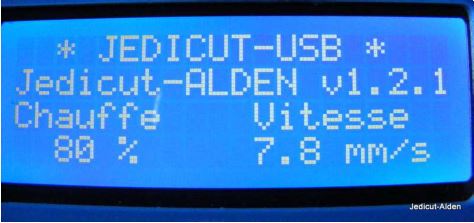
Ici découpe en vitesse rapide. Le 7.8 mm/s est juste là pour montrer la vitesse la plus rapide de fonctionnement de ma machine.
Test de la version Luxe avec Jedicut
Si vous avez câblé les fins de course, vérifiez leurs fonctionnements. Sollicitez-les, les uns après les autres, le I doit se transformer en K et le Buzzer doit tinter aussi (si dans la config vous avez mis un 1 pour BUZZER_ON).
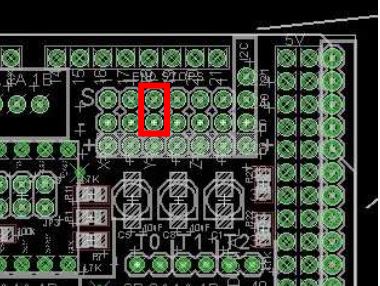
Si vous n’utilisez pas les fins de courses, vous devez mettre un cavalier sur la carte Ramps 1.4…
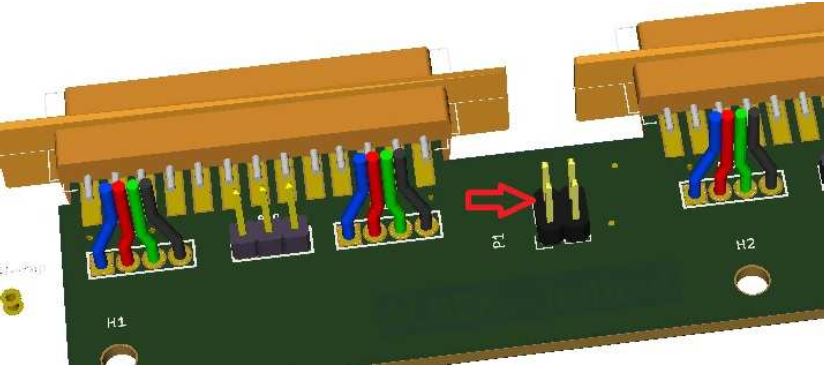
…ou sur la carte des DB 25 si vous avez réalisé les circuits imprimés. Les 2 Pins à droite de la flèche.
Pour les essais, positionnez à la main la mécanique de vos axes X, X1, Y, Y1 à au moins 20 mm des butées mécaniques.
Positionnez lez interrupteurs :
- Mode sur PC,
- Moteurs sur ON,
- Chauffe PC,
- Cut sur OFF.
Lancer Jedicut et une commande manuelle de 10 mm par axe pour vérifier le sens de rotation. S’il est besoin d’inverser le sens aller dans Outils puis Option et onglet Machine cocher la case correspondante puis faites Appliquer et OK et vérifiez votre action.
Vérifier les distances de déplacement. Si ce n’est pas bon, vérifiez vos calculs et modifiez le Sketch Arduino conf.h puis téléversez de nouveau le sketch.
Dépannage : Si vous n’avez pas de communication, vous pouvez essayer l’autre dll :
- Al1_USBSerial.dll, choisir dans Outils puis Option et onglet Communication
- Faire Appliquer et OK
- Fermer Jedicut, le rouvrir ensuite.
Séquence pour positionner les axes de votre machine à zéro vous le faites à partir des commandes manuelles de Jedicut. Positionnez lez interrupteurs :
- Mode sur PC,
- Moteurs sur ON,
- Chauffe PC,
- Cut sur OFF.
Ce n’est pas une séquence automatique. Vous approchez vos mécaniques à environ 10 mm des butées mécaniques. Pour chaque axe (un seul à la fois) :
- Vous commandez un mouvement de – 15 mm en vitesse de découpe.
- Le fin de course est sollicitée, le moteur s’arrête, le buzzer tinte, le I est devenu K.
- Le programme de l’Arduino demande à Jedicut de terminer sa séquence, le buffer de l’Arduino est effacé pour recevoir une prochaine commande. Vous n’avez rien vu c’est fait très rapidement.
- Sur la commande manuelle de Jedicut vous affichez + 1 pour réaliser une avance de 1 mm.
- Sur le pupitre des interrupteurs il y a un Bouton-poussoir, vous appuyez dessus, le K devient I.
- Le buzzer se tait, en restant appuyé sur le BP, vous lancez dans Jedicut l’avance de 1 mm, vous relâchez le BP, votre axe est positionné à l’origine.
Vous faites la même manipulation pour les 3 autres axes.
C’est beaucoup plus long à expliquer qu’à réaliser 😉

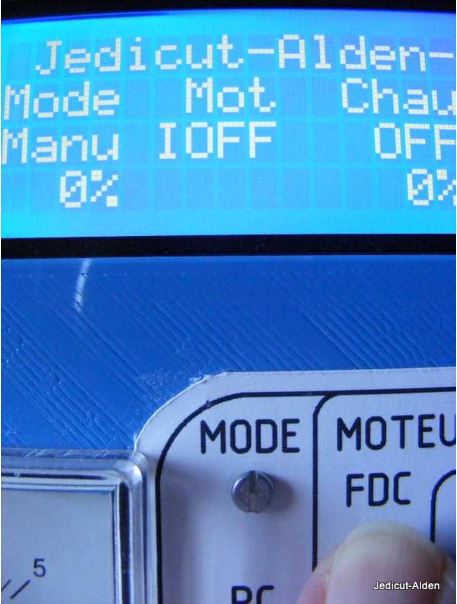
A gauche, on voit que fin de course est sollicité, on voit le K devant Mot. OFF, le BP pour le shunt des fins de course est en bas à droite sur la photo sous FDC. Sur la photo de droite, un doigt appuie sur le BP, on voit que le K s’est transformé en I. Ne tenez pas compte des indications sur les photos Mode, Mot, Chauf, les photos n’ont pas été prises pendant une séquence de mise à l’origine.
Utilisation des commandes de la version Luxe
Les interrupteurs de commande Mode, Mot, Chauf doivent être basculés vers le haut pour que les commandes venant de Jedicut soient prises en compte. Si vous basculez un de ces 3 interrupteurs pendant une découpe, il y a arrêt des moteurs, arrêt de la chauffe et Jedicut termine sa séquence, l’Arduino vide son Buffer. Vous avez la possibilité de commander la chauffe du fil en manuel pour dégager le bloc de polystyrène. Le réglage de la chauffe se fait par le potentiomètre ou l’encodeur rotatif selon votre choix.
Vous pouvez donc vous servir de ces 3 interrupteurs comme arrêt d’urgence.
Le réglage de la consigne de chauffe par l’encodeur : Il faut que vous ayez choisi l’encodeur rotatif dans la configuration du sketch de l’Arduino.
Appuyez sur le bouton de l’encodeur, vous voyez apparaître le signe > devant la consigne de chauffage, vous tournez l’encodeur à la valeur de votre choix, ici 26 %, vous appuyez de nouveau sur le bouton de l’encodeur, le signe > disparaît, la valeur est prise en compte pour la chauffe.
Si la chauffe est limitée à 80 % dans la config du sketch Arduino, le réglage manuel sera limité à 80% comme pour le signal qui vient de Jedicut. L’avantage de l’encodeur rotatif, le réglage est conservé si on bouge le bouton, par contre c’est moins rapide que le potentiomètre. L’encodeur est avec l’afficheur, j’ai fait un petit programme pour ma connaissance de l’encodeur, moi je préfère le potentiomètre.

La commande de chauffe du cutter électrique est disponible lorsque le Mode est en Manu.
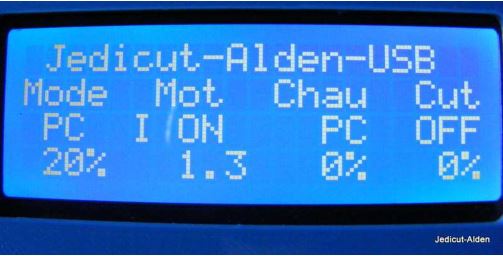
Ecran pendant la découpe en vitesse lente 1.3 mm/s et 20% de chauffe.
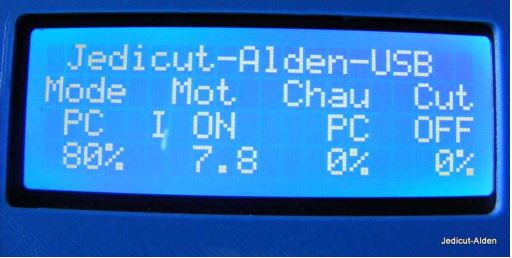
Ecran pendant la découpe en vitesse lente 7.8 mm/s et 80 % de chauffe.
Pour conclure vos essais
Voici un fichier de découpe : Aile_complète.jdc
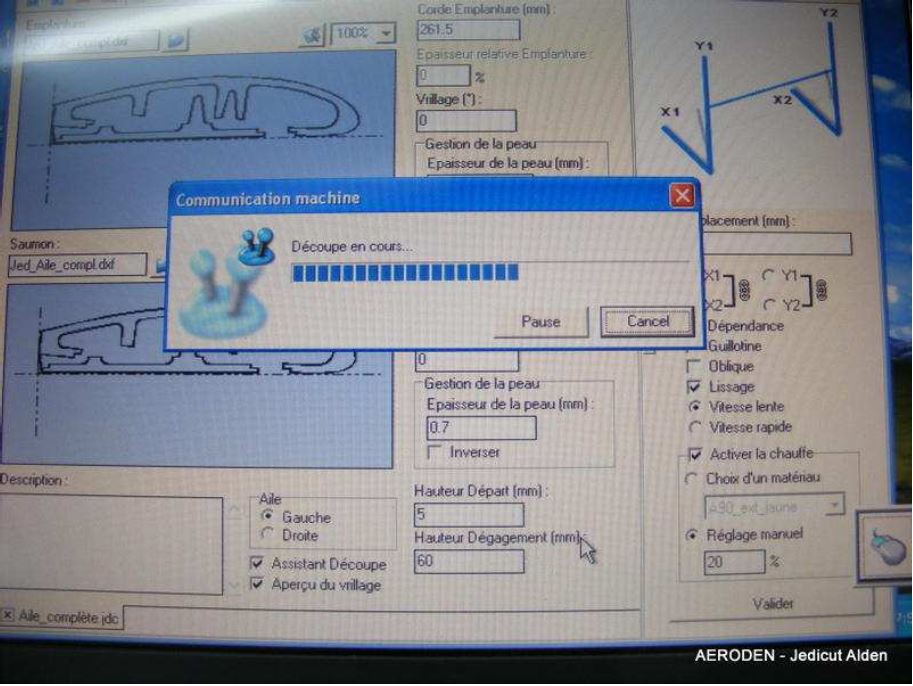
Comme ce sont des essais, il manque un petit morceau 😉
Avec mon ancienne machine et l’électronique Arduino + Ramps 1.4 Le résultat est très bon 🙂
C’est la fin de ce dossier sur la construction d’une carte de contrôle CNC à base d’Arduino Mega et de Ramps 1.4. Si vous avez des questions, rendez vous sur le forum 😉
Le dossier complet avec tous les fichiers nécessaires à la réalisation de cette carte de contrôle est disponible ici : https://drive.google.com/open?id=0BwnRsMt6_HIYZzZzNWQzS1FOQ
Auteur : AERODEN
Blog : http://alainfelixdenis.wordpress.com/
Site internet : http://www.aeroden.fr



salut
j ‘adore ce que vous faites !!!!!
bravo !!
continuez
Claude
Merci beaucoup.
Pour commencer : bravo pour votre travail et votre partage d’information et de passion.
Je suis méga (lol) intéressé par ce projet, mais je ne connais pas du tout arduino, et j’aimerai faire ma cnc le plus simple possible car mon but est de découper essentiellement des ailes volantes.
Donc j’aimerai savoir si le programme (la version simple) injecté dans la mega2560 fonctionnerait correctement si je branchait directement les moteur a la Ramp1.4, donc en évitant la commande manuelle afin de tout gérer essentiellement par Jedicut ? Merci davance pour votre contribution
Bonjour Sam,
La version la plus simple fonctionne correctement. La qualité de découpe est identique pour les 3 versions.
Si tu as téléchargé le dossier avant le 9 mars 2017, je te recommande de le recharger car il y a une mise à jour pour les versions les plus simples.
Le 08/03/2017 Remplacement sketch « fcaldenmega_1-2-1 » par » fcaldenmega_1-2-1-1″ et notice de Rev1 en Rev2
Le dossier comprend aussi un tuto pour l’Arduino, la Ramps 1.4 et le réglage du courant des drivers en fonction de tes moteurs PAP.
Si tu bloques quelque part, il y a le forum du site.
Bon réalisation.
Bonjour,je suis un vieux modéliste du club cap 64 de Pau .Ma machine cnc fil chaud n’est encore qu’un projet . Première exploit j’ai réussi a allumer une LEED avec ma carte arduino! Vous voyez c’est pas gagné !
Voici mon souci ,je n’arrive pas a ouvrir votre dossier complet .Je clique sur les fichiers rien ne ce passe et je n’ai pas la main sur les fichier pdf ?
Merci de votre réponse , et encore bravo pour le travail accompli , vous me donnez envie d’aller jusqu’au bout de mon projet
Bonjour Jacques, merci du compliment. Pour télécharger le dossier ; lorsque vous arrivez sur la fenêtre, en haut à droite de la fenêtre noire, il y a un icone qui représente une flèche vers le bas avec un petit trait sous la flèche, vous cliquez dessus et le téléchargement démarre. Bonne lecture.
Merci pour votre réponse rapide , j’ai pu extraire tous les fichiers .
Je continue mes études !
Bonjour 🙂
Un petit mot pour vous remercier de tout ce gigantesque travail…et pour avoir eu l’extraordinaire gentillesse d’en faire profiter tout le monde… C’est génial!!! …Bon, ma machine est en cours de finition, d’ici qq jours j’attaque la partie électronique … Une belle CNC fil chaud toute neuve en remplacement de ma vieille « Rustica » et BB2001 qui sont allées prendre une retraite bien méritée dans un confortable placard… Place aux jeunes!!! lol…