
Objectif de ce dossier : donner la possibilité aux nouveaux adeptes de la découpe fil chaud de s’équiper d’une électronique bon marché, performante et facile à réaliser en utilisant Jedicut et une électronique USB + Arduino + Ramps 1.4.
Cet article n’est certainement pas parfait, j’ai essayé de le rendre accessible aux néophytes afin qu’ils réalisent leur machine sans trop de problème. Que les plus aguerris acceptent les répétitions, qu’ils me remontent aussi les erreurs éventuelles. Le dossier complet Jedicut_Alden_Simple_Affichage rassemble toutes les documentations nécessaires à la réalisation. Il est important de lire entièrement cette notice avant de se lancer.
Important : Les connaissances de l’Arduino, de la carte Ramps 1.4 et de l’environnement IDE Arduino ne sont pas détaillées dans cet article. Il faut lire aussi « Arduino + Ramps 1.4 + IDE » (inclus dans le dossier en téléchargement).
Je vous souhaite une bonne réalisation.
3 options possibles pour cette carte de contrôle CNC
En se basant sur le même principe Arduino + Ramps 1.4, il est possible de réaliser 3 versions :
- Une version simple, c’est le minimum à réaliser.
- Une version avec affichage (écran LCD),
- Une version « super luxe » avec affichage et panneau de commande.
La version « super luxe » est détaillée dans un dossier dédié.
Pour savoir quoi acheter, toutes les références sont dans la boutique CNC de Jedicut.
Schéma de câblage de la version simple
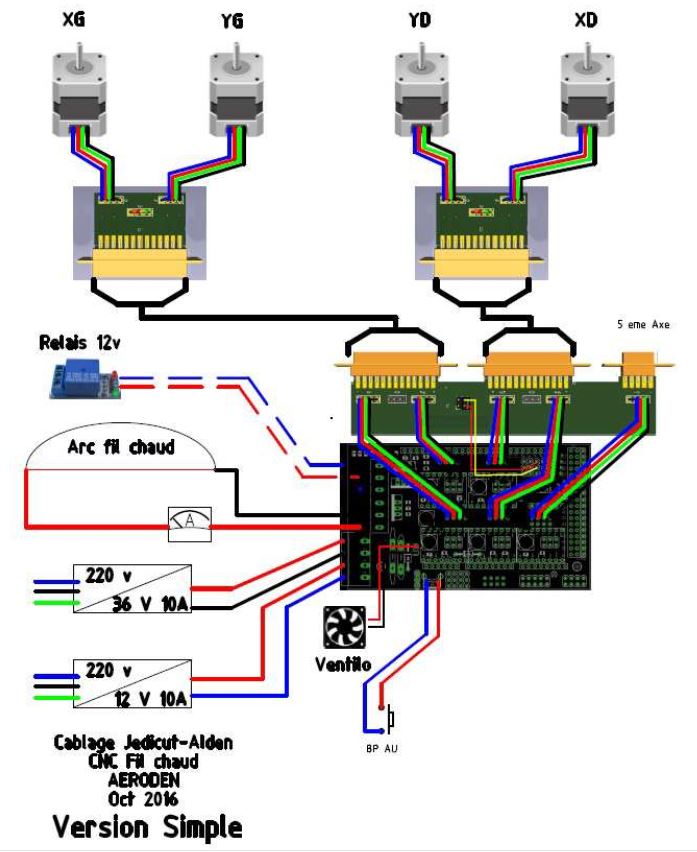
Matériel nécessaire pour la version simple :
- Arduino mega,
- Ramps1.4,
- Alim 12v,
- Alim 36v,
- PWM chauffe,
- Arc fil,
- Ampèremètre,
- Ventilateur des drivers,
- Commande d’un relais de coupure de chauffe.
Cette version ne gère pas les fins de course mini. Toutes les commandes se font par Jedicut.
Arrêt d’urgence par BP externe : celui-ci est mis en parallèle sur le BP « RESET » de la carte Ramps 1.4. Celle ci n’ayant pas de pin « RESET » à disposition, il faut donc souder 2 fils sur le BP « RESET » d’origine.
Schéma de câblage de la version avec écran
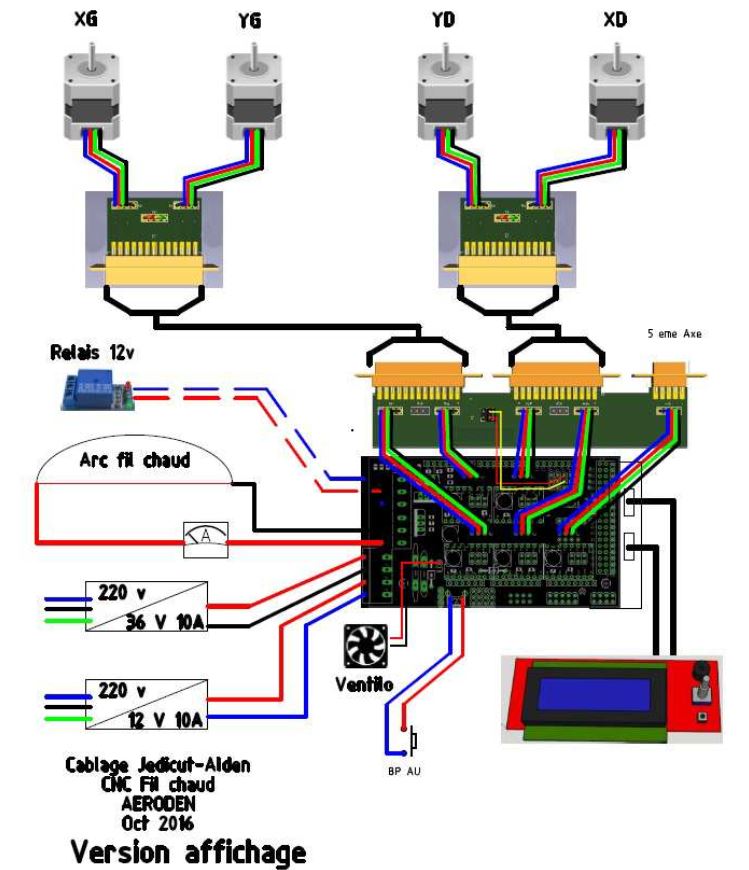
Pour cette version, il suffit de rajouter un afficheur 4×20 (l’afficheur graphique n’est pas compatible).
Le rôle de cet afficheur :
- Pendant l’initialisation du contrôleur CNC, il affichage des paramètres de configuration machine.
- Pendant la découpe, il affiche la vitesse de coupe et la puissance de chauffe en %.
Le matériel nécessaire
Pour la version Simple :
- Arduino Mega + Ramps 1.4 + drivers,
- Alimentation 12V 10A,
- Alimentation 36V 10A,
- Text step,
- Ampèremètre (recommandé),
- Programme Arduino : fcaldenmega_1-2-1-1.
Pour la version avec affichage, on rajoute :
- Afficheur LCD + nappe pour son raccordement.
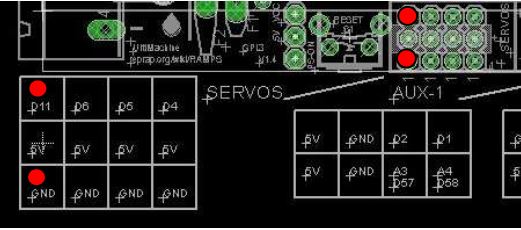
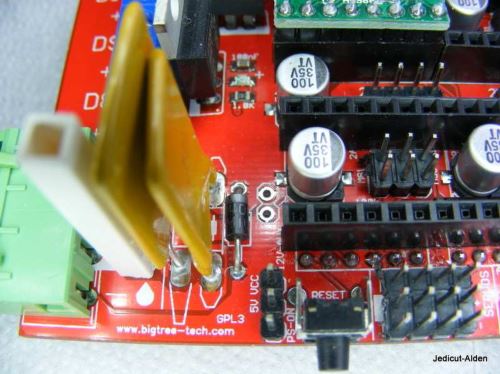
Pour les trois versions, j’ai ressorti sur une pin du connecteur « AUX-0 » ou « SERVO » de la RAMPS 1.4 (D11) une recopie des impulsions de step de X1, cela permet de faire un contrôle avec un oscilloscope.
Le point test D11 et GND sont représentés par des points rouges.
Une fabrication simplifiée
Pour les versions simple et affichage, le raccordement des moteurs peut se faire directement sur la carte Ramps, sans circuits imprimés intermédiaire.
Si vous choisissez cette option, vous pouvez passer directement à la réalisation de votre contrôleur CNC.
Les trois versions ont le même coffret, les plans dxf font partie du dossier.
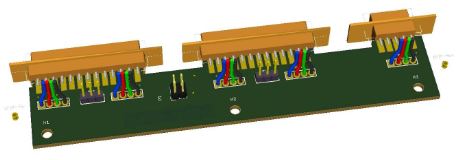
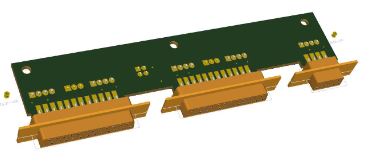
Simulation des cartes électroniques
La carte de commandes manuelles avec connecteur pour câble plat vers Ramps 1.4 (côté composants et côté cuivre).
DB25 de connexions des équipements X1-Y1 ou X2-Y2 et des fins de courses. Pour les moteurs, les pins sont doublées pour chaque fil. Il faut donc 2 cartes.
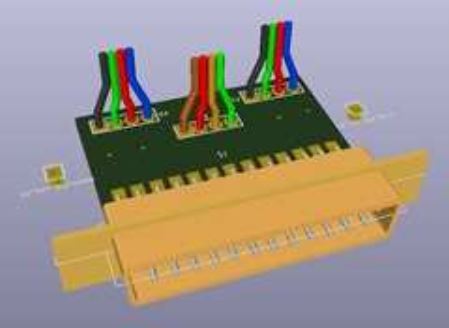
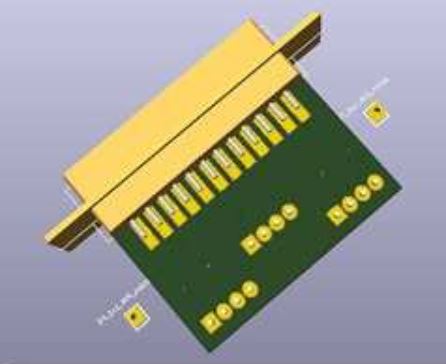
Les deux connecteurs DB25 pour la liaison des moteurs et des fins de course des équipements X1-Y1 et X2-Y2. Une DB9 pour éventuellement un 5 ème axe.
Les fichiers gerber des 2 faces cuivrées, le fichier de perçage, et le fichier de contour sont réalisés par KiCad. Ces fichiers sont directement lus par le logiciel CamBam. Je génère les 4 fichiers GCode pour ma fraiseuse CNC.
Pour ceux qui ne connaissent pas le logiciel Kicad, rendez vous dans le dossier CI_PDF vous trouverez tous les fichiers en *.pdf. Ces fichiers contiennent les tipons et les perçages.
Ces cartes sont en vente dans la boutique Jedicut, ou contacter Aeroden en messagerie privé sur le forum.
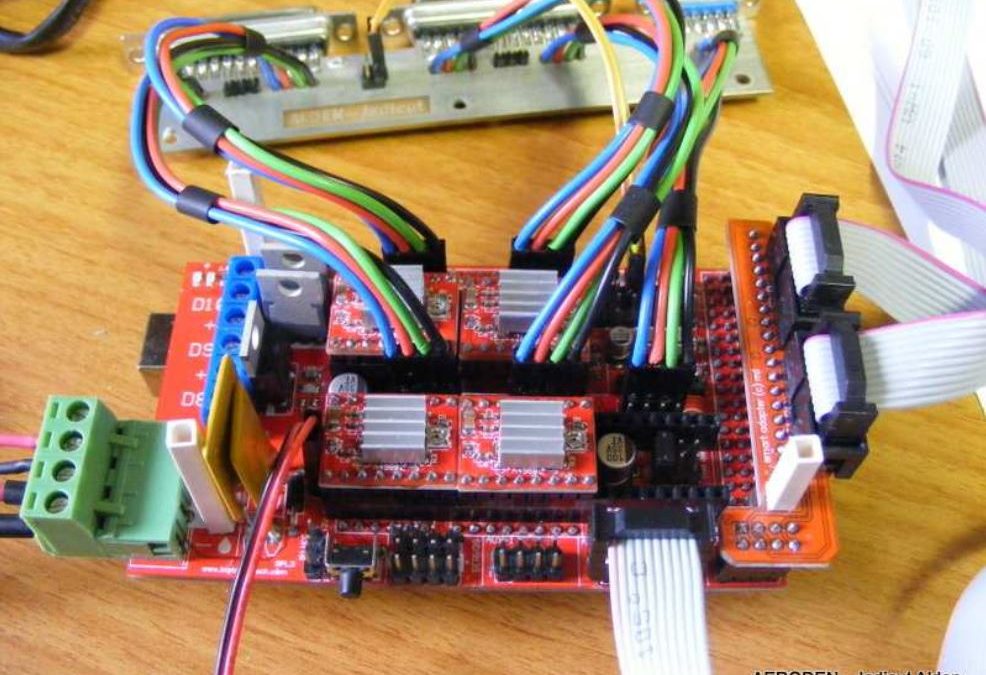
Réalisation de votre contrôleur CNC
J’ai détaillé la fabrication des cartes électroniques dans le premier dossier Arduino et Ramps 1.4 pour CNC.
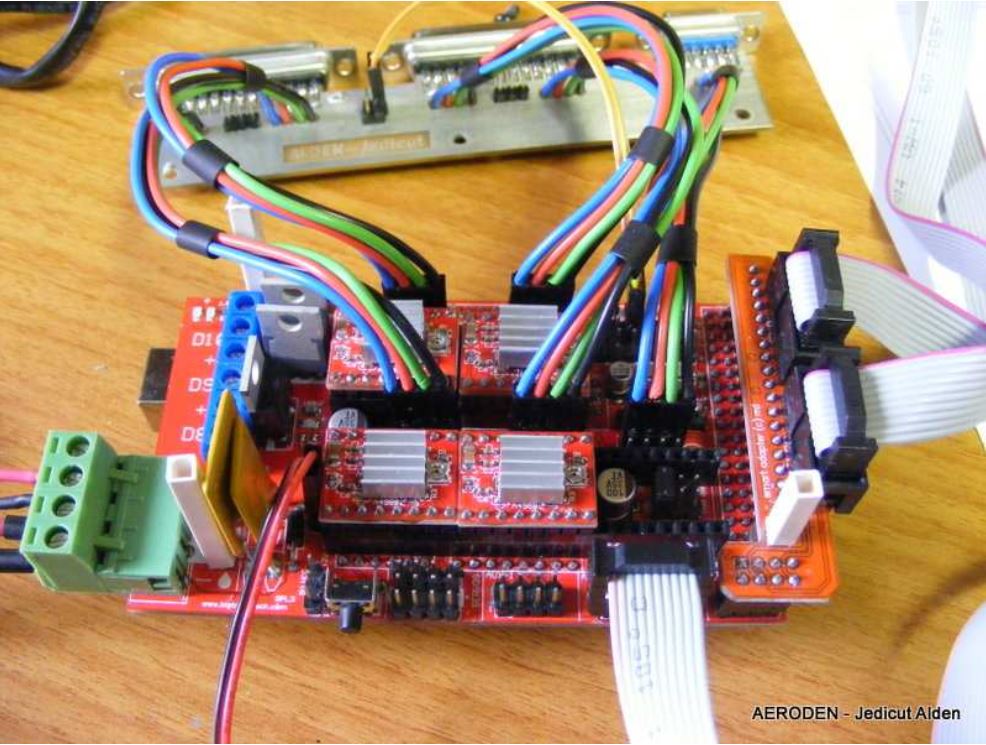
Vous obtiendrez ce résultat.

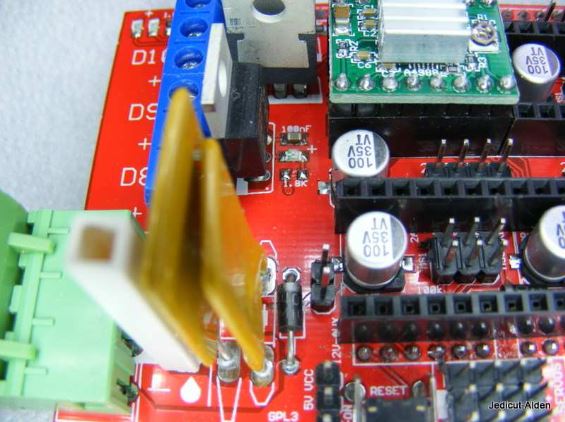
Sur ma carte Ramps 1.4 il manque 2 picots pour le ventilateur des drivers, on voit les 2 trous à coté de la diode.
Soudure des 2 picots, le ventilateur sera bien alimenté en 12 v.
Présentation du support de ventilateur. Celui-ci est imprimé 3D, vous pouvez le faire en plastique plié à chaud.

Essai des cartes Arduino et Ramps 1.4 et réglage des drivers des moteurs pas à pas
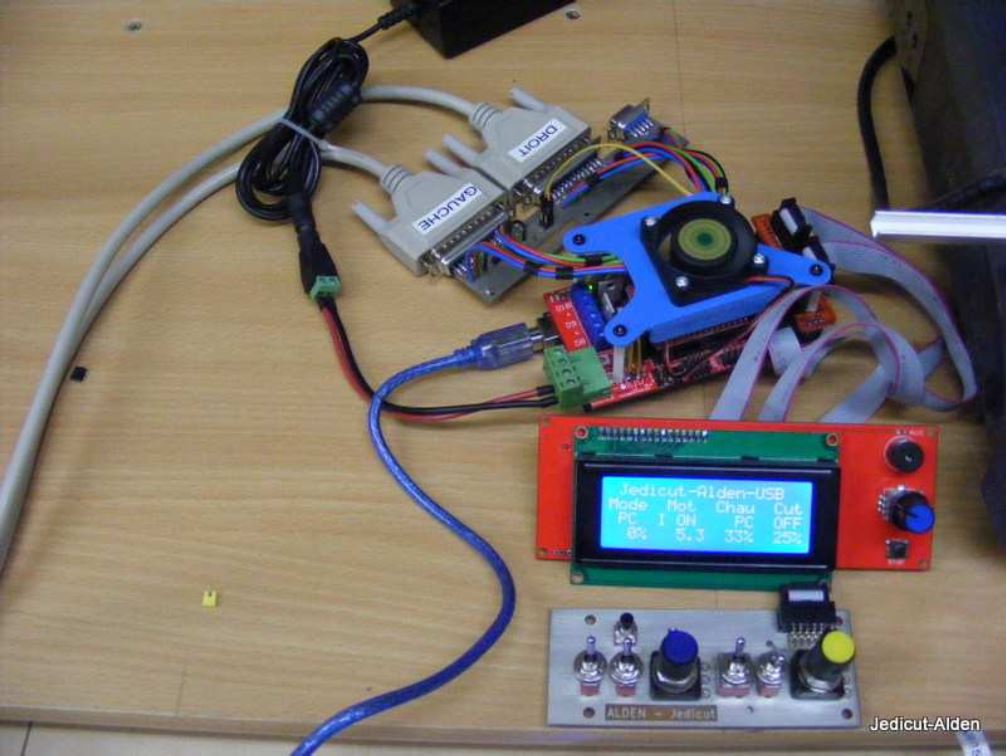
Vous câblez l’ensemble pour réaliser les essais avec votre machine, la mise en boitier se fera après les essais.
Voir le dossier ARDUINO + RAMPS + IDE
Après les essais de la carte Ramps 1.4, vous pouvez coller les radiateurs sur les Pololu. Prendre garde qu’ils ne touchent pas les potentiomètres.
Vous réglez la REF au courant nominal de vos moteurs. Vous recoiffez le tout du ventilateur.
Programmation de l’Arduino
Attention, la programmation du firmware et sa configuration sont différents selon la version de la carte de contrôle que vous avez choisi.
Pré-requis
- Télécharger et installer l’IDE Arduino (gratuit).
- Faite une copie du sketch dans le sous-répertoire Applications du répertoire Arduino. Le version originale du sketch se trouve dans le dossier contenant toute la documentation, dans le répertoire Jed-Alden-Realisation\Sketch-Plugin\Sketch_Ard
Personnalisation du sketch
Lancez « IDE Arduino », puis dans le menu faites Fichier > Ouvrir, cherchez dans le répertoire Applications le dossier de votre sketch, ouvrir le dossier et cliquez 2 fois sur le fichier dont l’extension est « .ino » (ex : LMFAO_V1_5_0.ino)
Une nouvelle fenêtre s’ouvre et votre programme est disponible. Il se peut que vous ayez d’autres onglets que celui de votre programme, ceux-ci font partie de votre sketch, ce sont des fichiers qui permettent d’avoir des fichiers plus courts, plus faciles à modifier et souvent des fichiers de configuration.
Dans le menu Fichier > Enregistrer sous, choisissez le répertoire Applications de Arduino puis Enregistrer le projet avec le nom de votre choix.
Votre sketch a son nouveau nom, vous le voyez dans l’onglet (ex : fcaldenmega_1-2-1_al1).
L’onglet conf.h contient les paramètres propres à votre machine.
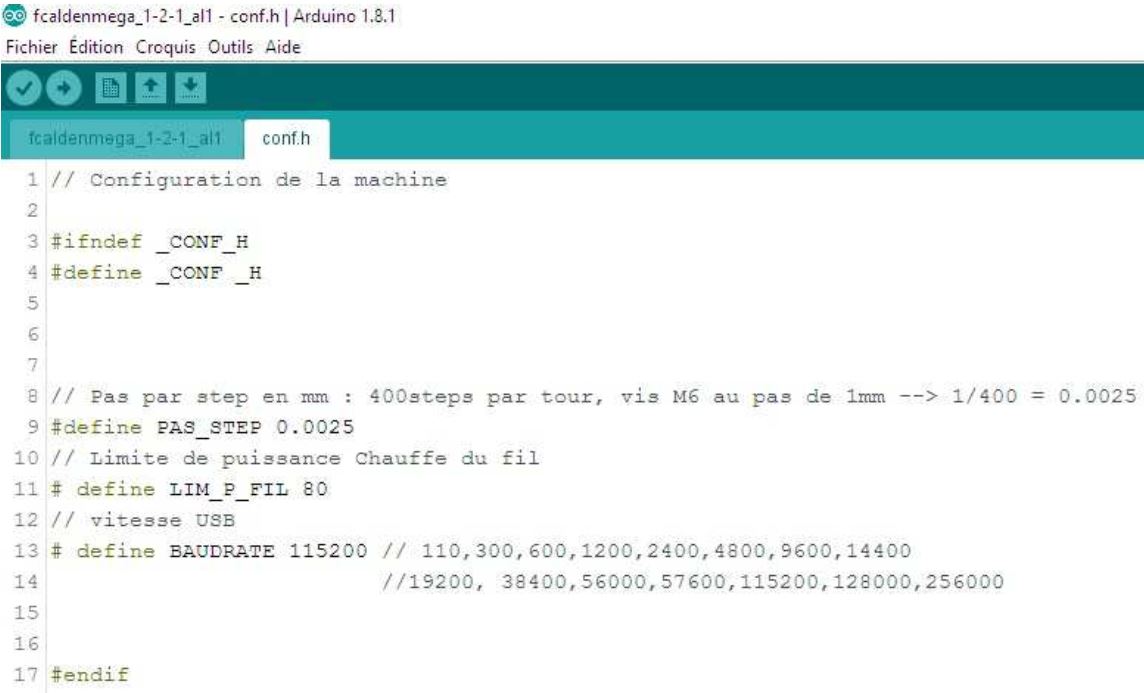
Les paramètres sont définis de la façon suivante :
#define MAX_PERCENTAGE_WIRE 50
Explication :
- #define est une instruction de définition
- MAX_PERCENTAGE_WIRE est un paramètre
- 50 est la valeur du paramètre (si la valeur est un texte, il doit être mis entre guillemets.
- Si une ligne commence par //, il s’agit d’un commentaire.
Les paramètres à personnaliser :
- MACHINE_NAME : Le nom de votre machine (max 20 caractères, epace compris).
- VERSION : Je conseille de remplacer le dernier 0 par la première lettre de votre prénom (1 seul caractère autorisé)
- LANG_ENGLISH ou LANG_FRENCH : Choisissez votre langue préférée en mettant en commentaire la ligne qui ne vous intéresse pas (rappel : on rajoute // devant la ligne). Celle que vous choisissez ne doit pas être en commentaire.
- MM_PER_STEP : distance parcouru par le chariot pour une rotation de 1 pas (Ex : pour un moteur de 200 pas/tour, une électronique en ½ pas et une vis de 1 mm, vous devez indiquer 0.0025).
- MAX_PERCENTAGE_WIRE : Limite de la puissance vers le fil chaud.
- MOTEUR_ON_ASSERVI :Si la valeur est 0, les moteurs resteront alimentés à l’arrêt (idéal pour les machines à courroies). Sinon il faut mettre 1.
- INV_DIR_MARSK : on laisse 0b00000000 , le sens de rotation des moteurs sera configuré dans Jedicut.
- BAUDRATE : on laisse 115200 .
- INVERT_STEPPER_DRIVER_ENABLE_PIN : Si vous utilisez les drivers de la carte Ramps1.4, laissez les // devant cette ligne.
- CHAUFFE_ASSERV : Laissez à 0 dans un premier temps. Vous pourrez activez cette option ultérieurement (voir le dossier complet).
Enregistrer votre fichier. Revenez sur votre programme « .ino » par l’onglet.
Programmer l’Arduino
Maintenant nous pouvons téléverser dans l’Arduino Mega 2560:
- Branchez le câble USB pour relier l’Arduino à votre ordinateur
- Vérifiez dans l’IDE le type de carte et le port Comx
- Téléversez le sketch.
Si vous êtes en version simple, vous passez à la phase d’essai avec Jedicut.
Si vous êtes en version affichage, à la fin du téléversement l’afficheur indique par exmple :
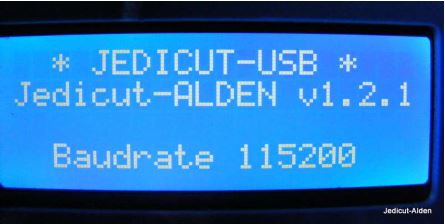
Pendant l’initialisation, l’affichage rappelle :
- La configuration.
- La version du sketch.
- La vitesse de transmission.
Ensuite l’affichage indique :
- Le déplacement à chaque step en mm,
- La limite de chauffe.
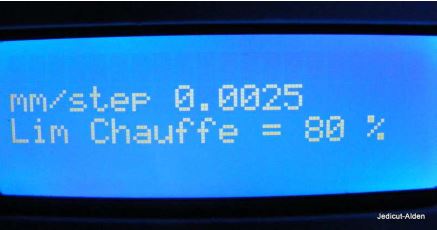
A la fin de l’initialisation on a les indications de fonctionnement :
- La vitesse de découpe,
- La puissance de chauffe transmise par Jedicut.
La réalisation de cette carte de contrôle est terminée !
La suite…
La suite de cet article est consacrée à la configuration de Jedicut et aux tests : https://www.jedicut.com/blog/carte-controle-cnc/cnc-arduino-ramps-configurer-jedicut
Le dossier complet avec tous les fichiers nécessaires à la réalisation de cette carte de contrôle est disponible ici : https://drive.google.com/open?id=13N6odoc7QIGyIrnlVSobiSxcdpc9AVZP
Si vous avez des questions, créez une discussion spécifique sur le forum, ça simplifiera les recherches pour les personnes qui se poseront les mêmes questions que vous 😉
Auteur : AERODEN
Blog : http://alainfelixdenis.wordpress.com/
Site internet : http://www.aeroden.fr



Rétroliens/Pings